Familiarization with modern methods of industrial process diagnostics
- Teacher: Tomasz Białaszewski
Zapoznanie ze współczesnymi metodami diagnostyki procesów przemysłowych
- Teacher: Tomasz Białaszewski
Zapoznanie ze współczesnymi metodami diagnostyki procesów przemysłowych

Preparation and presentation by each graduate student of a presentation in electronic form, presenting the assumptions and foundations of the diploma thesis and specific goals to be achieved against the background of the current state of knowledge and practice on a given topic. In addition, the student presents a work plan and planned schedule of implementation and other aspects of the implementation of the diploma thesis, including possible threats (risk analysis). Discussion of the presentation. Preparation and presentation by each graduate student of a presentation in electronic form, presenting the obtained results and achieved goals of the diploma thesis and comparing the intentions with the results. Critical discussion of the presentation.
*********************************************************************
For Master's students: Read the instructions for postgraduate students
on the KSDR faculty website, familiarize yourself with the diploma subject card/table, think about the diploma topic, and then contact your supervisor.
*********************************************************************
The master's thesis should, above all, have a clearly defined scientific goal and a creative task to be solved, meeting specific assumptions in general. Then, you should review this issue in the literature, propose a technology for solving the given task, refine the detailed assumptions and develop your own project (its structure and details). This should be followed by system operation tests and their documentation and analysis, as well as a summary of the work performed and conclusions, and a literature list. The whole work should be properly quoted (giving the sources of the knowledge and statements provided). The work should be supplemented with instructions for the user of the constructed system, guidelines (regarding directions and methods for further development) for the future designer, as well as a solid application description (additional instructions on the Department's website) prepared for the Ministry of Science, including scenarios for the use of the system and its most important characteristics (praise the achievements and techniques used; here you can also repeat your more important project achievements).
In general, it must be known what is the subject of the thesis, what was done and why (no creative goal). The report should represent the standard scientific level. Master's theses must be scientifically creative (mathematical approach) or systemic (hardware or software), and cannot rely on the need to support a specific foreign system.
Please also note that there are also general university instructions.
***************************Application description************************
This should be a brief description of the MSc application
in the following practical and systemic categories
(technical, technological, engineering, automation and information):
1. Title
2. Application Purpose and Aims
3. Functionality:
3.1. List and description of functions
3.2. List of exemplary applications (general)
3.3. Detailed descriptions / scenario of the application
(bit more written out examples)
4. The general architecture of the system
5. Hardware architecture
6. Architecture of software
7. Description of the method and process of preparing the application,
i.e. the actual course work on diploma
(phases of application development, technical expression of the work time-schedule).
Points 4, 5 and 6 should be given general/schematic.
In developing the report, please use my tips to reports and diplomas
(http://www.eti.pg.gda.pl/katedry/ksd/dydaktyka/dyd_index.html)
and the following (loose) sketch:
1. Assumptions and formulation of the task
2. Analysis of the problem (with the review of existing solutions)
3. Specifications
4. Preparation of the project
5. Prototyping and implementation
6. Testing
7. Estimaton of the application
(including a comparison to other solutions)
8. Conclusions and prospects for future work.
Remember that each diploma thesis must usually be a complete application,
a working unit with a GUI type to (co)work with the user.
- Teacher: Zdzisław Kowalczuk
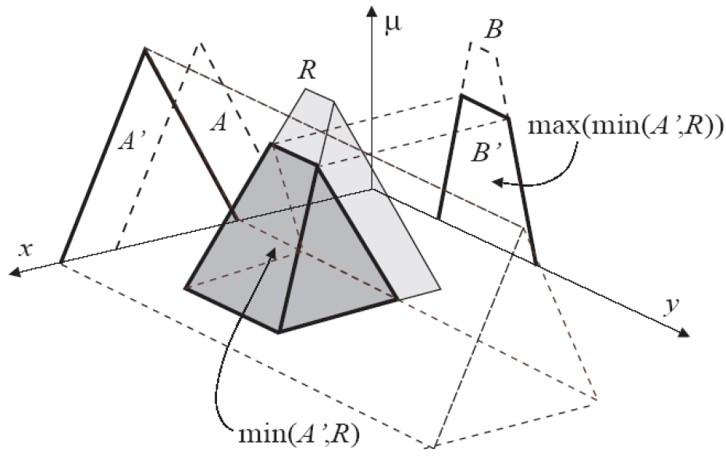
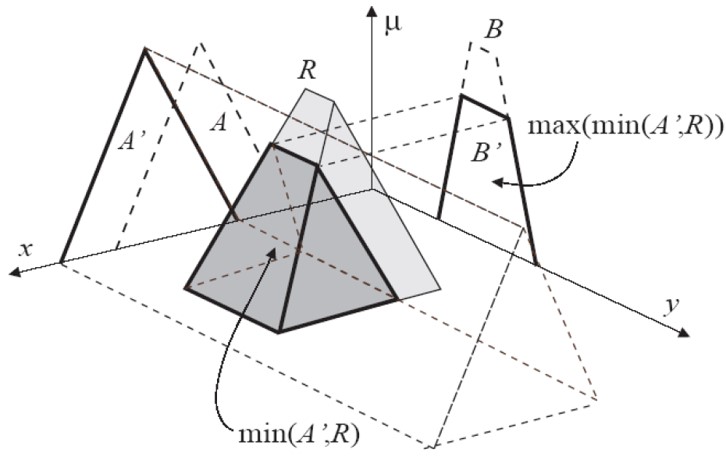
Kurs do przedmiotu "Sterowanie rozmyte" na sem letni 2025, drugi stopień
- Teacher: Piotr Fiertek
Kurs do przedmiotu "Fuzzy Control" na sem letni 2025, drugi stopień
- Teacher: Piotr Fiertek
Projekt z przedmiotu Identyfikacja procesów.
- Teacher: Piotr Kaczmarek
Automatyka i Robotyka, studia II stopnia
- Teacher: Jerzy Konorski
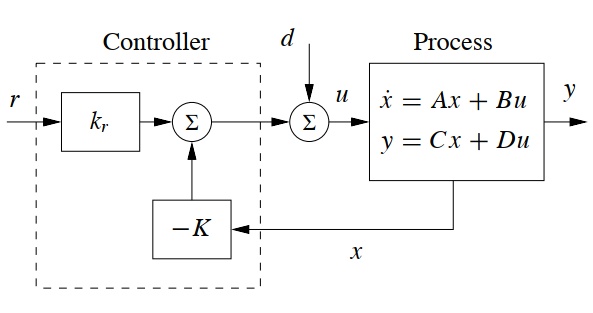
Wykład i ćwiczenia z przedmiotu Nowoczesne metody teorii sterowania
- Teacher: KRZYSZTOF Dudziak
- Teacher: Piotr Fiertek
- Teacher: ARTUR Gańcza
- Teacher: Piotr Kaczmarek
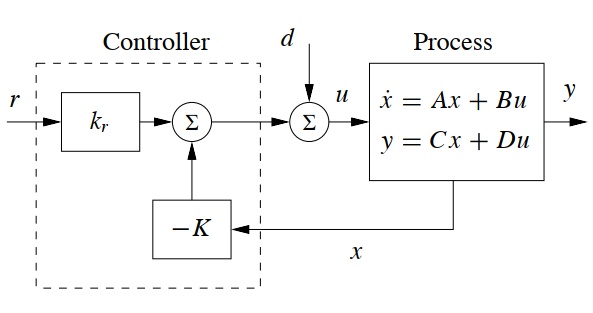
Wykład i ćwiczenia z przedmiotu Nowoczesne metody teorii sterowania
- Teacher: KRZYSZTOF Dudziak
- Teacher: Piotr Fiertek
- Teacher: ARTUR Gańcza
- Teacher: Piotr Kaczmarek
Materiały do projektu
- Teacher: Piotr Kaczmarek
- Teacher: KAMIL Stawiarski
Materiały do wykładu z przedmiotu
- Teacher: Piotr Kaczmarek
Zapoznanie ze współczesnymi metodami diagnostyki procesów przemysłowych
- Teacher: Tomasz Białaszewski
- Teacher: Zdzisław Kowalczuk
Familiarization with modern methods of industrial process diagnostics
- Teacher: Tomasz Białaszewski
- Teacher: Zdzisław Kowalczuk
II st, 2 sem. AiR
- Teacher: Zdzisław Kowalczuk
II st (ang), sem. AiR
- Teacher: Zdzisław Kowalczuk
II st, 2 sem. AiR
- Teacher: Zdzisław Kowalczuk